
青岛海洋地质研究所在深海自主/遥控水下机器人高精度导航定位方面取得新进展
来源:地调局青岛海洋所
作者:刘慧敏、单瑞
发布时间:2025-12-15
近日,中国地质调查局青岛海洋地质研究所深海地质地球物理调查研究团队在深海自主/遥控水下机器人高精度导航定位方面取得新进展,相关成果以“An in-situ sound speed profile correction scheme for the tight integration of SINS/USBL in Deep-sea ARV navigation”为题,发表于Satellite Navigation期刊(JCR一区,影响因子10.1)。
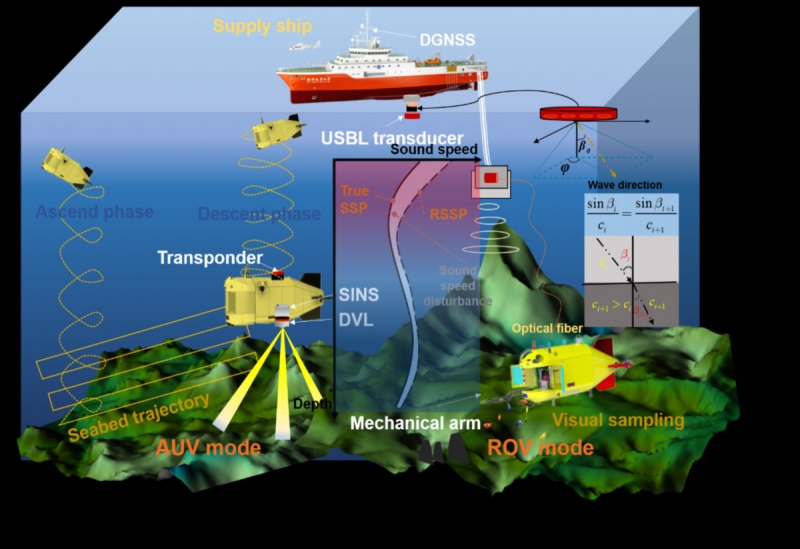
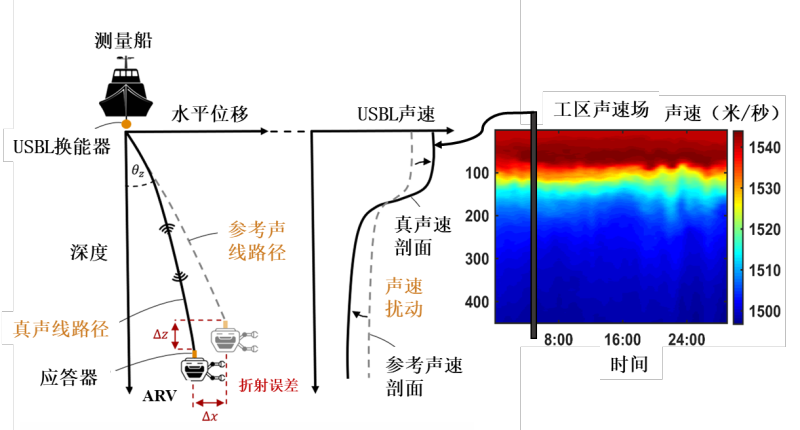
随着新型深海自主/遥控混合式水下机器人在深海矿区的推广应用,其搭载的超短基线声学定位系统(USBL)与捷联惯性导航系统(SINS)组合导航技术成为提升设备水下安全和作业效率的关键。团队科研人员针对SINS和USBL组合导航,基于分层等梯度射线声学跟踪原理推导分析了USBL的位置解算与声速剖面的数学模型,将USBL的原始声学观测量同SINS进行紧组合。
该研究还考虑深海USBL长时间工作时参考声速剖面的时间变化,对非线性USBL的声线跟踪模型进行线性化,建立不同深度声速平均扰动同USBL位置扰动的数学模型。最终将新方法应用于SINS/USBL/DVL/PG组合导航系统,基于自适应分级信息滤波将实时声速扰动构建模型参数同组合导航误差参数进行自适应滤波估计。实验结果表明,该方法能有效实时估计声速扰动,显著提升惯性-声学紧组合导航系统的性能。
该研究成果由青岛海洋地质研究所和中国石油大学(华东)的科研人员共同完成。青岛海洋地质研究所的刘慧敏副研究员为第一作者,中国石油大学(华东)的赵爽副教授为通讯作者。该研究得到中国地质调查项目、国家自然科学基金和山东省自然科学基金等项目的联合资助。
 京公网安备 11010202007433号
京公网安备 11010202007433号